

 联系我们
联系我们

1、机械安全 I/O 基板(JANCD-YSF22B-E)

(图片来源于网络 侵删)
(1)机械安全端子台基板(JANCD-YFC22-E)是为了连接安全输出输入信号等专用外部信号的端子台基板。

(图片来源于网络 侵删)

(图片来源于网络 侵删)
|
信号 名称 |
连接编号 |
双路输入内容 |
出厂设定 |
|
SAFF1+ SAFF1- |
1 |
安全插销:如果打开安全栏的门,用此信号切断伺服电源。连接安全栏门上的安全插销的联锁信号。如输入此联锁信号,则切断伺服电源。当此信号接通时,伺服电源不能被接通。注意这些信号在示教模式下无效。 |
用跳线短接 |
|
2 |
|||
|
SAFF2+ SAFF2- |
3 |
||
|
4 |
|||
|
EXESP1+ EXESP1- EXESP2+ EXESP2- |
5 |
外部急停:用来连接一个外部操作设备的外部急停开关。入此联锁信号,则切断伺服电源。当此信号接通时,伺服电源不能被接通。注意这些信号在示教模式下无效。
|
用跳线短接 |
|
6 |
|||
|
7 |
|||
|
8 |
|||
|
EXDSW1+ EXDSW1- EXDSW2+ EXDSW2- |
9 |
外部安全开关:当两人进行示教时,为没有拿示教编程器的人连接一个安全开关。
|
用跳线短接
|
|
10 |
|||
|
11 |
|||
|
12 |
|||
|
FST1+ FST1- FST2+ FST2- |
13 |
维护输入:在示教模式时的测试运行下,解除低速极限。短路输入时,测试运行的速度是示教时的100%速度。输入打开时,在SSP输入信号的状态下,选择第1 低速(16%)或者选择第2 低速(2%)。 |
开路 |
|
14 |
|||
|
15 |
|||
|
16 |
|||
|
SSP+ SSP- |
17 |
选择低速模式:在这个输入状态下,决定了 FST (全速测试)打开时的测试运行速度。 打开时:第 2低速 (2%) 短路时:第 1低速 (16%) |
|
|
18 |
|||
|
EXHOLD+ EXHOLD- |
19 |
外部暂停:用来连接一个外部操作设备的暂停开关。如果输入此信号,则程序停止执行。当输入该信号时,不能进行启动和轴操作 |
用跳线短接 |
|
20 |
|||
|
EXSVON+ EXSVON- |
21 |
外部伺服 ON :连接外部操作机器等的伺服 ON开关时使用。通信时,伺服电源打开。 |
用跳线短接 |
|
22 |
|||
|
SYSRUN+ SYSRUN- |
23 |
SYSRUN 信号:根据SYSRUN信号判断DX200控制柜的正常/异常状态时使用 |
开路 |
|
24 |
|||
|
ONEN11+ ONEN11- ONEN12+ ONEN12- |
25 |
伺服接通启用:在机器人系统分为多个伺服区域时,单独开启/关闭各区域的伺服电源的功能。使用此信号连接。
|
跳线短接 |
|
26 |
|||
|
27 |
|||
|
28 |
|||
|
ONEN21+ ONEN21- ONEN22+ ONEN22- |
29 |
||
|
30 |
|||
|
31 |
|||
|
32 |
|||
|
ONEN31+ ONEN31- ONEN32+ ONEN32- |
33 |
||
|
34 |
|||
|
35 |
|||
|
36 |
|||
|
ONEN41+ ONEN41- ONEN42+ ONEN42- |
37 |
||
|
38 |
|||
|
39 |
|||
|
40 |
|||
|
OT21+ OT21- OT22+ OT22- |
41 |
外部轴超程 :外部轴等机器人本体以外部分要防超程使用。 |
开路 |
|
42 |
|||
|
43 |
|||
|
44 |
|||
|
OT31+ OT31- OT32+ OT32- |
45 |
||
|
46 |
|||
|
47 |
|||
|
48 |
|||
|
OT41+ OT41- OT42+ OT42- |
49 |
||
|
50 |
|||
|
51 |
|||
|
52 |
|||
|
PPESP3+ PPESP3- PPESP4+ PPESP4- |
53 |
急停按钮接点输出:示教编程器急停按钮的触点输出时使用。 |
开路 |
|
54 |
|||
|
55 |
|||
|
56 |
|||
|
PBESP3+ PBESP3- PBESP4+ PBESP4- |
57 |
在输出DX200控制柜门前的急停按钮触点时使用。 |
开路 |
|
58 |
|||
|
59 |
|||
|
60 |
|||
|
GSIN11+ GSIN11- GSIN12+ GSIN12- |
61 |
通用安全输入 :通用安全输入信号用于安全逻辑回路功能。 |
打开 |
|
62 |
|||
|
63 |
|||
|
64 |
|||
|
GSIN21+ GSIN21- GSIN22+ GSIN22- |
65 |
||
|
66 |
|||
|
67 |
|||
|
68 |
|||
|
GSOUT11+ GSOUT11- GSOUT12+ GSOUT12- |
69 |
通用安全输出:通用安全输出信号用于安全逻辑回路功能。 |
打开 |
|
70 |
|||
|
71 |
|||
|
72 |
|||
|
GSOUT21+ GSOUT21- GSOUT22+ GSOUT22- |
73 |
||
|
74 |
|||
|
75 |
|||
|
76 |
|||
|
GSEDM1+ GSEDM1- |
77 |
||
|
78 |
|||
|
GSEDM2+ GSEDM2- |
79 |
||
|
80 |
|||
|
+24V2U3 |
81 |
DC+24V2 输出端子 |
打开 |
|
82 |
|||
|
92 |
|||
|
93 |
|||
|
024V2 |
83 |
DC+24V2 输出端子 |
打开 |
|
84 |
|||
|
94 |
|||
|
95 |
|||
|
AXDIN_COM AXDIN1 AXDIN2 AXDIN3 AXDIN4 AXDIN5 AXDIN6 |
85 |
直接输入(伺服):输入搜索功能等快速响应信号时使用。
|
打开 |
|
86 |
|||
|
87 |
|||
|
88 |
|||
|
89 |
|||
|
90 |
|||
|
91 |
|||
|
AIN_COM AXIN1 AXIN2 |
96 |
通用输入(伺服) :输入搜索功能等快速响应信号时使用。 |
打开 |
|
97 |
|||
|
98 |
|||
|
AXOUT1 AXOUT2 |
99 |
通用输出(伺服):向外部输入信号时使用。 |
打开 |
|
100 |
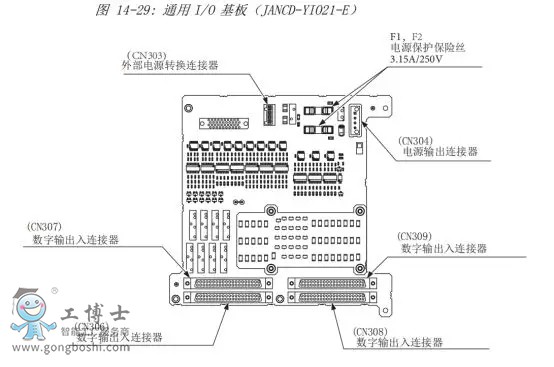
1、通用IO基板插头外接
(1)电箱背板插头
(图片来源于网络 侵删)

(图片来源于网络 侵删)
(图片来源于网络 侵删)
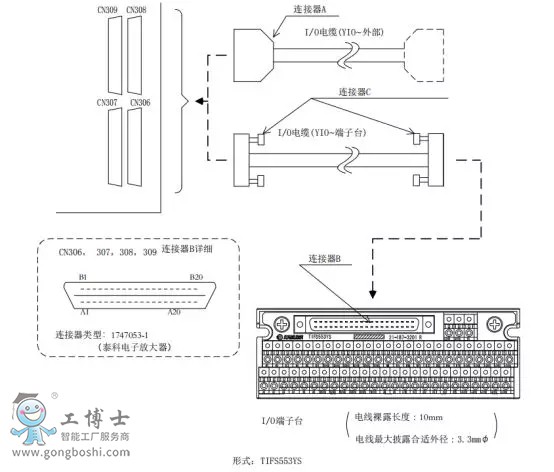
(4)连接器端子头

(图片来源于网络 侵删)

(图片来源于网络 侵删)

(图片来源于网络 侵删)
(1)接线板端子

(图片来源于网络 侵删)
(图片来源于网络 侵删)
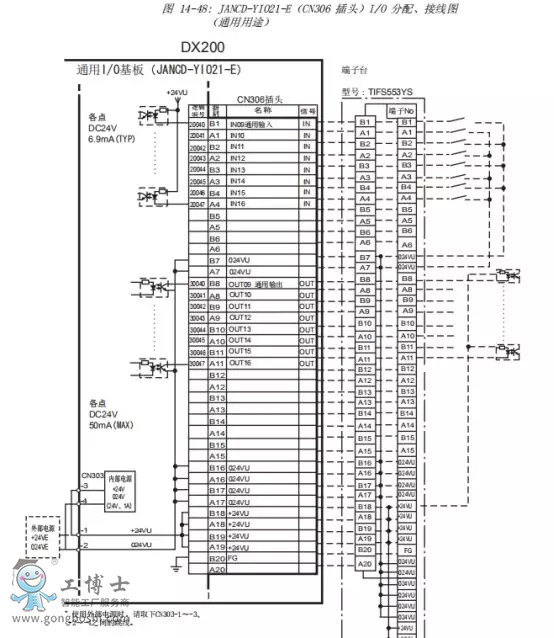
(1)CN306接线端子图

(图片来源于网络 侵删)
4、通用IO基板CN307
5、通用IO基板CN308
(1)CN308接线端子图
(2)CN308实物图
三、安川外部启动常用的信号及其接线图
1、安全端子台基板常用IO接线图
(1)外部急停接线图
外连接外部操作设备等的急停开关时使用。输入信号,关闭伺服电源,停止程序执行。信号输入时,无法接通伺服电源。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(2)暂停接线图
连接外部操作设备等的暂停开关时使用。输入信号,停止程序。信号输入时将无法开始作业和进行轴操作。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(3)外部上电接线图
连接外部操作设备等的伺服开启开关时使用。输入信号,开启伺服电源。